Pour flasher une carte
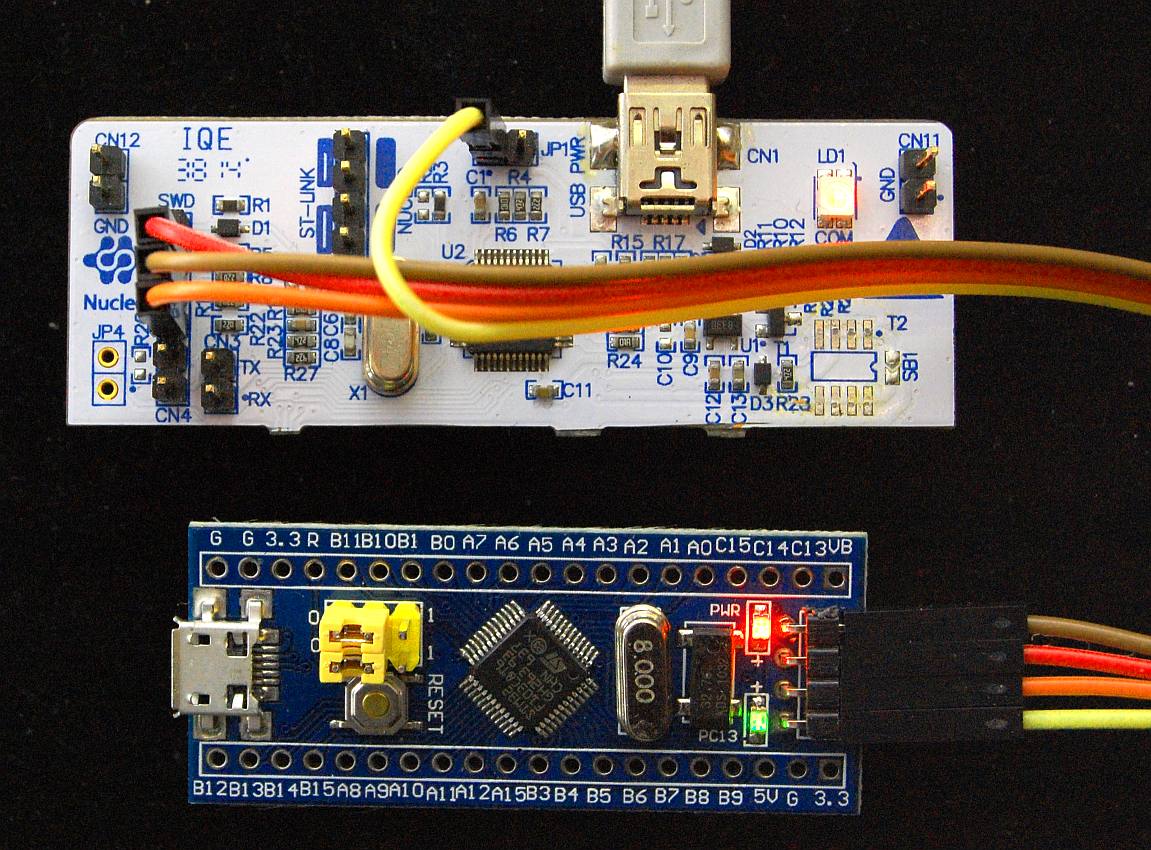
Commences par câbles un ST-LINK sur la carte. Sur l'image c'est une blue-pill, mais l'ordre des pins et le câblage est le même !
 Une fois câblé, lances OpenOCD à la racine du projet :
Une fois câblé, lances OpenOCD à la racine du projet :
sudo openocd -f black_pill.cfg
Si le ST-LINK a été bien câblé, alors OpenOCD devrait rester ouvert en tache de fond.
Une fois openocd en tâche de fond, il suffit de lancer dans un terminal le script debug.sh qui se trouve dans le dossier du projet pour flasher la carte.
Precautions pour le deboggage
- Ne pas poser de cartes non vernies directement sur l'armature métallique du robot, cela peut créer des court-circuits dans la carte et l'endommager !